A medida que se diseñan y fabrican nuevos autobuses la cantidad de componentes que se agregan a estos vehículos también aumentan. Los nuevos motores electrónicos, sistemas de frenado inteligente, suspensión controlada electrónicamente y otras características de confort hacen necesaria la aplicación de la electrónica y por consiguiente una red de cables que conecten todos estos sistemas.
Hoy día un autobús foráneo cuenta con un motor con inyección electrónica que ayuda un ahorro importante de combustible, transmisión automatizada que selecciona la mejor marcha, control crucero inteligente, suspensión controlada electrónicamente que regula la altura de acuerdo al peso, control de luces principales y de navegación que detectan si un foco esta fundido y regulan la velocidad del motor en marcha de emergencia, en fin son muchos los componentes que actualmente intervienen en el funcionamiento de un bus, y por obvias razones el cableado necesario para su funcionamiento y comunicación equivaldría a cientos de metros que afectarían el peso y el costo del autobús.
Para solucionar estos inconvenientes se ha diseñado el sistema MULTIPLEXADO o CAN BUS, el cual basa su principio de funcionamiento en la transmisión de MÚLTIPLES SEÑALES por un mismo cable, o en otros términos hace una comunicación bidireccional entre computadoras, con lo que la cantidad de cableado y el uso de relevadores disminuye considerablemente.
Robert Bosch, fue la marca pionera en desarrollar el sistema. El nombre CAN BUS viene de la abreviatura Contoller Area Network y como se indica se utilizan una serie de MÓDULOS de control o COMPUTADORAS que están conectados en una red a lo largo de todo el autobús.
Actualmente cada fabricante ha desarrollado su propio sistema Multiplexado pero siempre bajo el mismo principio de funcionamiento, en este articulo tomaremos como referencia el de VOLVO denominado BEA.
Existen MÓDULOS para MOTOR conocido como EECU (Unidad de Control Electrónico del Motor), TRANSMISIÓN o TECU (Unidad de Control Electrónico de la Transmisión), RETARDADOR, FRENOS (ABS ASR), LUCES, SUSPENSIÓN o ECS (Suspensión Controlada Electrónicamente) conectados entre si a una computadora central o VECU (Unidad de Control Electrónico del Vehículo) que es la que recibirá todas las señales, las procesara y enviara instrucciones a cada una de las computadoras que requiera o que ocupen de dicha señal. De aquí es de donde proviene la designación BUS, ya que al igual que en un autobús viajan varios pasajeros en el BUS de datos viajaran varias señales digitales que controlaran las funciones del autobús.
Todos los MÓDULOS DE CONTROL interactúan entres si gracias a la red MULTIPLEXADA, cada una envía y recibe señales y cada una de ellas tiene la función de auto diagnostico, dicho diagnostico puede ser visualizado en el tablero de instrumentos que dicho sea de paso también es un modulo electrónico conectado a la red.

La comunicación entre computadoras se hace mediante protocolos de comunicación, dichos protocolos son una especia de reglas para facilitar la comunicación y el diagnostico del vehículo, se establecen a nivel internacional y la comparten los fabricantes de vehículos pesados. Los protocolos más utilizados son el J1939 Y J1708.
Un protocolo establece las reglas de instalación como por ejemplo color de cable, longitud y velocidad de transmisión, cabe aclarar los cables de comunicación deben ir trenzados para evitar interferencias de otros sistemas como radios o equipos celulares.
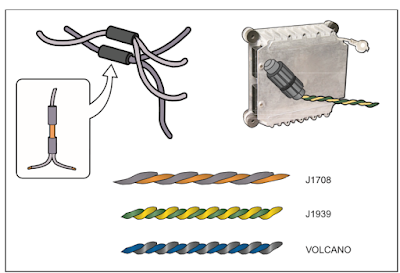
El J1939 es un protocolo de alta velocidad y se utiliza para la comunicación entre computadoras gracias a la velocidad de transmisión de 250000 bits/segundo. El protocolo J1708 se usa como respaldo pero sobre todo para los mensajes de diagnostico, ademas cada fabricante puede utilizar su propio protocolo de comunicación como el VOLCANO en el caso de VOLVO.
La transmisión de datos se procesa en código binario el cual como ya sabemos consta unicamente de 0 y 1 la combinación de estos dígitos genera un mensaje que cada computadora puede procesar gracias a instrucciones que fueron previamente programadas en la memoria de los módulos.
Anteriormente había hablado de que en el tablero se pueden leer los mensajes de diagnostico en caso de alguna anomalía pero también se cuenta con unas lineas especiales de diagnostico hacia un conector en el cual se enlaza una pc con un software especial que se conecta al VECU mediante una interface o adaptador que permite que PC y MODULO se comuniquen.

Después de esta explicación podemos ver un ejemplo de comunicación entre computadoras y a diferencia entre los sistemas convencionales.
Para referencia tenemos las señales del pedal del acelerador. En servicio pesado se usa un potenciómetro que de acuerdo al voltaje recibido envía una señal que se transforma en un porcentaje de aceleración de acuerdo a la posición del pedal.
En los sistemas convencionales que NO tienen MULTIPLEX la señal de acelerador llega directamente al modulo de control electrónico del motor y este a su vez controla el ancho de pulso para los inyectores y así se obtiene la aceleración.
En cambio en un sistema MULTIPLEX la señal del acelerador llega primero a la VECU, modulo que controla a todas las demás computadoras, la cual comprara la información de los otros módulos y si se cumplen las condiciones envía la señal al Modulo de Control Electrónico del Motor.
 En caso de que se detecte una falla por parte de alguno de los módulos, la señal del porcentaje del acelerador sera ignorada, pero en su lugar se generara una señal de operación en modo de emergencia limitando la aceleración y por lógica la velocidad, dicho fallo se registrara en en display del tablero.
En caso de que se detecte una falla por parte de alguno de los módulos, la señal del porcentaje del acelerador sera ignorada, pero en su lugar se generara una señal de operación en modo de emergencia limitando la aceleración y por lógica la velocidad, dicho fallo se registrara en en display del tablero.
Gracias al MULTIPLEX es que actualmente existen sistemas activos de seguridad como los de advertencia de desvío de carril o el control crucero inteligente.
Este sistema no son nuevos pero si los procedimientos de diagnostico ya que a veces una falla en un cable o alguna interferencia de otro dispositivo genera fallos que es complicado solucionar llegando a perder potencia en nuestro motor por que nuestro tablero ya no funciona adecuadamente, algo que en otros sistemas nada tiene que ver.
En resumen:
°Los sistemas MULTIPLEX ayudan a enlazar la comunicación entre las computadoras que controlan algunos componentes del autobús para que todas trabajen en una misma red.
°El sistema MULTIPLEX disminuye el número de cables que se utilizan en el autobús.
°El sistema MULTIPLEX permite programar funciones especificas como la activación de las luces intermitentes si se encienden los limpiadores, limitación de velocidad en caso de faro fundido, etc .
Espero que esta breve explicación ayude a entender algo del CAN BUS o MULTIPLEX, si requieres más información o quieres complementar esta entrada deja tu comentario o envía un correo a movilbusmexico@gmail.com.
Hoy día un autobús foráneo cuenta con un motor con inyección electrónica que ayuda un ahorro importante de combustible, transmisión automatizada que selecciona la mejor marcha, control crucero inteligente, suspensión controlada electrónicamente que regula la altura de acuerdo al peso, control de luces principales y de navegación que detectan si un foco esta fundido y regulan la velocidad del motor en marcha de emergencia, en fin son muchos los componentes que actualmente intervienen en el funcionamiento de un bus, y por obvias razones el cableado necesario para su funcionamiento y comunicación equivaldría a cientos de metros que afectarían el peso y el costo del autobús.
Para solucionar estos inconvenientes se ha diseñado el sistema MULTIPLEXADO o CAN BUS, el cual basa su principio de funcionamiento en la transmisión de MÚLTIPLES SEÑALES por un mismo cable, o en otros términos hace una comunicación bidireccional entre computadoras, con lo que la cantidad de cableado y el uso de relevadores disminuye considerablemente.
Robert Bosch, fue la marca pionera en desarrollar el sistema. El nombre CAN BUS viene de la abreviatura Contoller Area Network y como se indica se utilizan una serie de MÓDULOS de control o COMPUTADORAS que están conectados en una red a lo largo de todo el autobús.
Actualmente cada fabricante ha desarrollado su propio sistema Multiplexado pero siempre bajo el mismo principio de funcionamiento, en este articulo tomaremos como referencia el de VOLVO denominado BEA.
 |
| Distribución de las computadoras de un chasis VOLVO en un chasis con motor central |
 |
| Módulo de Control Electrónico del Motor VOLVO D12C |
Todos los MÓDULOS DE CONTROL interactúan entres si gracias a la red MULTIPLEXADA, cada una envía y recibe señales y cada una de ellas tiene la función de auto diagnostico, dicho diagnostico puede ser visualizado en el tablero de instrumentos que dicho sea de paso también es un modulo electrónico conectado a la red.

La comunicación entre computadoras se hace mediante protocolos de comunicación, dichos protocolos son una especia de reglas para facilitar la comunicación y el diagnostico del vehículo, se establecen a nivel internacional y la comparten los fabricantes de vehículos pesados. Los protocolos más utilizados son el J1939 Y J1708.
Un protocolo establece las reglas de instalación como por ejemplo color de cable, longitud y velocidad de transmisión, cabe aclarar los cables de comunicación deben ir trenzados para evitar interferencias de otros sistemas como radios o equipos celulares.

El J1939 es un protocolo de alta velocidad y se utiliza para la comunicación entre computadoras gracias a la velocidad de transmisión de 250000 bits/segundo. El protocolo J1708 se usa como respaldo pero sobre todo para los mensajes de diagnostico, ademas cada fabricante puede utilizar su propio protocolo de comunicación como el VOLCANO en el caso de VOLVO.
La transmisión de datos se procesa en código binario el cual como ya sabemos consta unicamente de 0 y 1 la combinación de estos dígitos genera un mensaje que cada computadora puede procesar gracias a instrucciones que fueron previamente programadas en la memoria de los módulos.
 |
| Ejemplo de un señal digital |
Anteriormente había hablado de que en el tablero se pueden leer los mensajes de diagnostico en caso de alguna anomalía pero también se cuenta con unas lineas especiales de diagnostico hacia un conector en el cual se enlaza una pc con un software especial que se conecta al VECU mediante una interface o adaptador que permite que PC y MODULO se comuniquen.

Después de esta explicación podemos ver un ejemplo de comunicación entre computadoras y a diferencia entre los sistemas convencionales.
Para referencia tenemos las señales del pedal del acelerador. En servicio pesado se usa un potenciómetro que de acuerdo al voltaje recibido envía una señal que se transforma en un porcentaje de aceleración de acuerdo a la posición del pedal.
En los sistemas convencionales que NO tienen MULTIPLEX la señal de acelerador llega directamente al modulo de control electrónico del motor y este a su vez controla el ancho de pulso para los inyectores y así se obtiene la aceleración.
En cambio en un sistema MULTIPLEX la señal del acelerador llega primero a la VECU, modulo que controla a todas las demás computadoras, la cual comprara la información de los otros módulos y si se cumplen las condiciones envía la señal al Modulo de Control Electrónico del Motor.

Este sistema no son nuevos pero si los procedimientos de diagnostico ya que a veces una falla en un cable o alguna interferencia de otro dispositivo genera fallos que es complicado solucionar llegando a perder potencia en nuestro motor por que nuestro tablero ya no funciona adecuadamente, algo que en otros sistemas nada tiene que ver.
En resumen:
°Los sistemas MULTIPLEX ayudan a enlazar la comunicación entre las computadoras que controlan algunos componentes del autobús para que todas trabajen en una misma red.
°El sistema MULTIPLEX disminuye el número de cables que se utilizan en el autobús.
°El sistema MULTIPLEX permite programar funciones especificas como la activación de las luces intermitentes si se encienden los limpiadores, limitación de velocidad en caso de faro fundido, etc .
Espero que esta breve explicación ayude a entender algo del CAN BUS o MULTIPLEX, si requieres más información o quieres complementar esta entrada deja tu comentario o envía un correo a movilbusmexico@gmail.com.

Comentarios